
Traffic simulation models are relevant tools for planning and operation of road traffic infrastructure. By modelling a transport system, we can both understand the complex phenomena of mobility and forecast the effect of a transport supply used by a particular transport demand.
The introduction of Intelligent Transportation System (ITS) with the aim of providing innovative services relating to traffic management and user information opened an opportunity for leveraging traffic simulation models and their use for assessing those ITS services before any deployment.
In FRONTIER, a new traffic simulation framework is being defined that can act as a multimodal network and traffic management tool, allowing the evaluation of multimodal strategies combining strategies for demand management, either passenger or freight transport, and strategies for transport supply, either traffic management strategies for network level or vehicle/local level application. These strategies can either be a part of an existing transport or can consider future mobility including Connected and Autonomous Transport Systems (CATS).
The traffic simulation tool in FRONTIER is Aimsun Next, and its upgrade will be implemented using a number of different programming tools including: Aimsun Next API, Aimsun microSDK, External Agent Interface, V2X Software Development Kit and Aimsun Ride.
- Aimsun Next API is a collection of functions, in Python or C++, that let you read information and perform actions during a mesoscopic, microscopic or hybrid mesoscopic-microscopic simulation. This allows changes to be made while the simulation is running whereas with scripting, changes can only be made before the simulation starts.
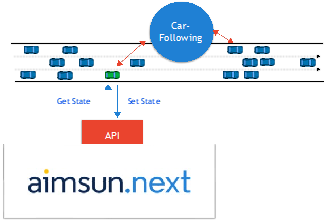
- Aimsun microSDK allows users to replace microscopic models (car-following, lane- changing, etc.) with their own behavioral models, programmed in C++, and is best suited to when the user has to implement a logic to continuously update the position and speed of individual vehicles, depending on the surrounding vehicles. The advantage of microSDK is that users can isolate the subset of behavioral models that they wish to override, and Aimsun Next will automatically apply the default models to the rest.

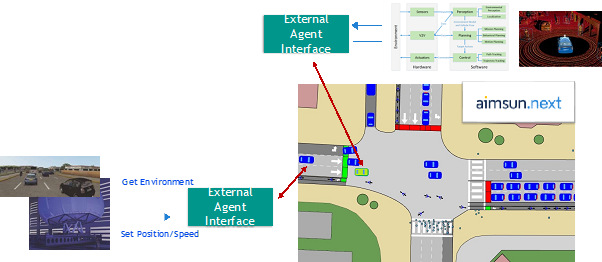
- The External Agent Interface (EAI) is designed to introduce an externally controlled vehicle into an Aimsun Next simulation and have that vehicle guided by the actions of, for example, a human driver in a simulator, an autonomous vehicle controller, or by an experimental control system being tested in a simulation environment.
- The V2X Software Development Kit (V2X SDK) is designed for testing connected vehicle applications through the use of a Vehicle Ad Hoc Network (VANet), an ephemeral network spontaneously created by a collection of connected vehicles in proximity to each other or in proximity to a similarly connected road-side unit (RSU).
- Lastly, Aimsun Ride, a simulation platform that allows the assessment of fleet management algorithms for Mobility as a Service (MaaS) and emerging fleet management services integrated in AImsun Next platform.
The expected extension of Aimsun Next using the different integration tools in FRONTIER has started integrating the algorithms implemented in T4.4 “Traffic management schemes/control for CCAM: vehicle/local level application” lead by TU Crete, including:
- Adaptive Cruise Control (ACC) time-gap adaptation strategy: A control strategy which aims to adjust in real time the ACC settings of equipped and connected vehicles based on the prevailing traffic conditions. This is achieved by suggesting to the automated vehicle drivers an appropriate value for the time-gap parameter.
- Mainstream Traffic Flow Control (MTFC): A feedback-based control strategy that employs mainstream traffic flow control at bottlenecks. This is achieved by applying variable speed limits to both automated and connected vehicles. AVs apply automatically the VSL messages and connected vehicles receive the VSL messages through on-board units to be applied manually by the driver. In case there is no connectivity, conventional vehicles obtain the VSL messages through VMSs (if any).
- Lane Change Advice (LCA). A feedback-based control strategy that aims to achieve a desired distribution of vehicles among the lanes in the immediate proximity of a bottleneck location, so as to exploit the capacity of each and every lane, thus increasing the overall (cross-lane) capacity. This is achieved by translating the lateral flows ordered by the strategy to lane change advices (to the left and to the right) to be communicated within the following control step to an appropriate number of connected vehicles (CCVs or AVs) in each segment-lane that are used as actuators for these decisions.
Later in the year we will report back and be able to show demonstrations of these functionalities as we start to test out these complex control systems.